
By Florence Thompson (CERN)
Contributors: Francisco Sanchez Galan, Gianluca D’Antuono, Sergio Di Giovannantonio, Mario Di Castro (CERN)
The CMS rotating shielding has now been successfully modified in-situ to prepare it to receive new vacuum modules for the HL-LHC, using a specifically designed method to deal with the space and radiation constraints of this complex manoeuvre.
The rotating shielding is an essential component situated at both extremities of the CMS experimental cavern to protect the detector and its surroundings against radiation coming from the collisions and the elements belonging to the LHC accelerator. This 110-tonne giant structure of steel and concrete surrounds the beampipe region when closed, and unfolds and rotates in a similar way to a door to allow for maintenance operations around the vacuum chambers.
Currently in the LHC, vacuum sector valves are situated inside the LHC tunnel. For the HL-LHC these will be removed, and new vacuum modules called VAX will be installed, however these new modules will be installed not in the LHC tunnel, but inside the rotating shielding in the experimental caverns of CMS and ATLAS.
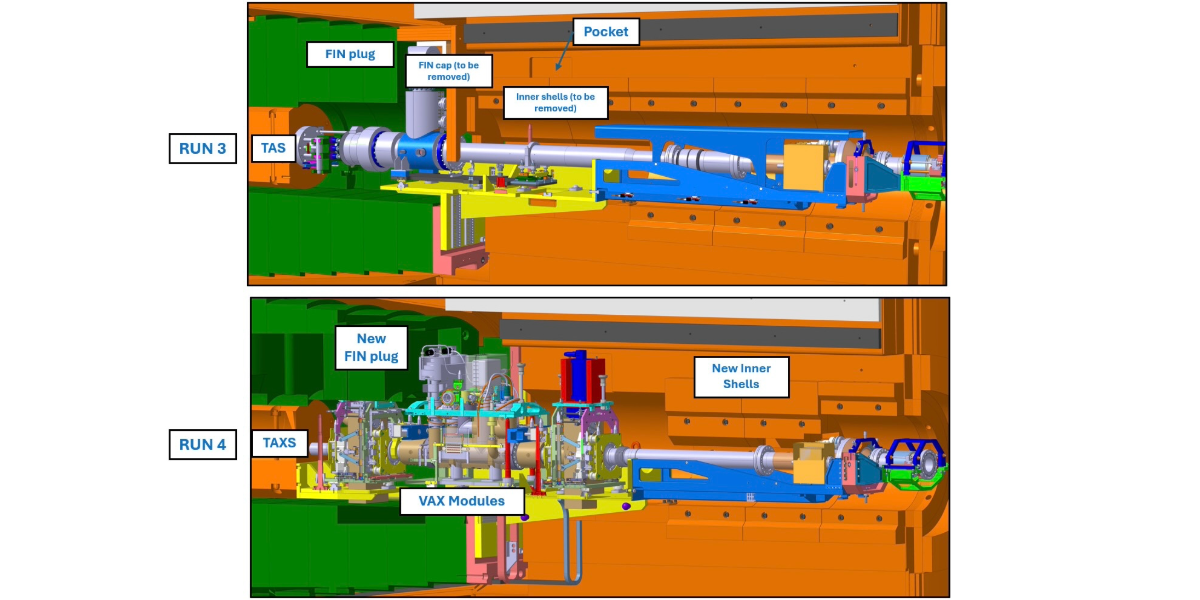
Figure 2. VAX module integration. Courtesy of Ali Karaki/EP-CMX/CERN
This introduced a challenge as within the shielding the space is extremely tight, meaning that the installation of the VAX, and any manouvres to maintain them, would risk breaking of other machinery within the shielding. It was therefore decided to create a pocket within the shielding to make space and ensure a safe distance between the different components within the shielding.
The space constraints limited what machines could be used to carry out this procedure, and also presented a challenge in terms of safety, as the activation of the shielding imposes limits to personnel access, due to radiation risk when the shielding is open.
In collaboration with the HL-LHC Collider-Experiment Interface work package (WP8) and CMS Experiment Systems group (EP-CMX), the BE-CEM group deployed a custom robotic solution to perform in-situ machining of the rotary shielding doors on both ends of the CMS detector (Plus and Minus), following the ALARA principle (As Low As Reasonably Achievable) to minimise radiation exposure.
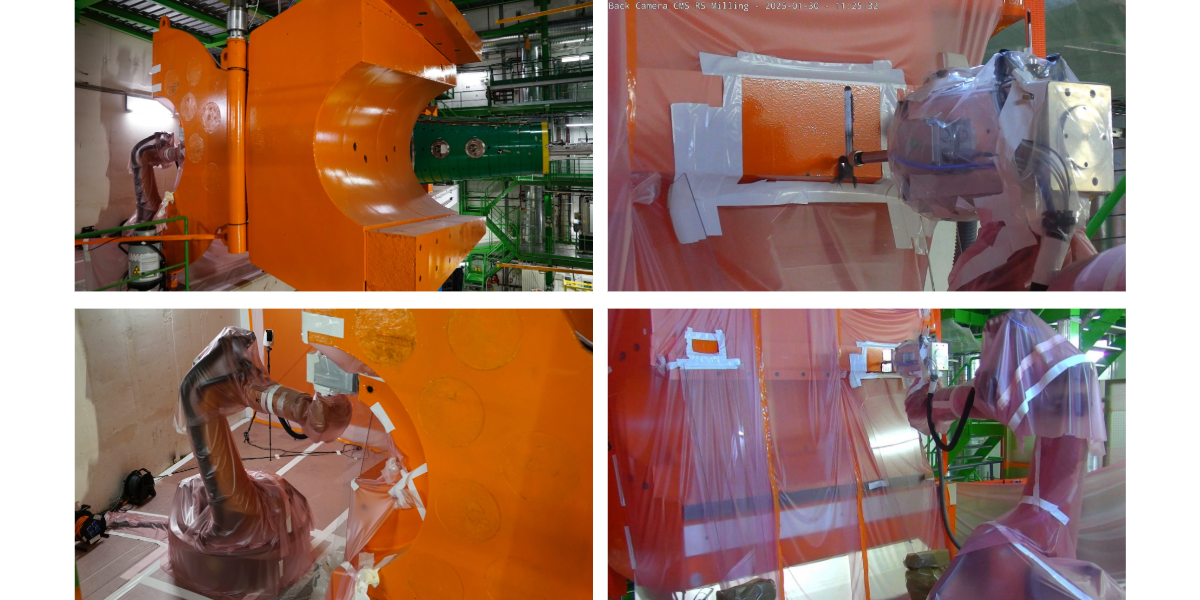
Figure 3. Robot in operation. The rotating shielding (the large orange steel doors) will close around the green structure, which hosts the beam pipe during operation of the LHC. Left: Florence Thompson / CERN, Right: BE-CEM group / CERN
The solution consists of a remotely controlled KUKA KR 120 industrial robot arm with six degrees of freedom and a 120 kg payload, specifically adapted for this task. It is equipped with a sensorised, air-cooled electro-spindle, tested and optimised for in-situ machining. A digital contact sensor ensures precise localisation of the workpiece relative to the robot, while an inertial measurement unit (IMU) was used during the testing phase to optimise cutting parameters and later for vibration monitoring during operation. To protect it from contamination and cutting debris, the robot was covered with a protective layer.
‘The devices equipping the robot are essential not only for precision purposes, but especially for ensuring the safe execution of the intervention,’ says Gianluca D’Antuono, one of the engineers integrally involved in testing and operating this robotic solution.
Engineers remotely programmed and supervised the robot from a control station in the CMS cavern, and successfully machined the internal part of the shielding.

Figure 3. Remote supervision of the robotic task. Florence Thompson / CERN
‘Before the intervention, and in line with best practices followed by the BE-CEM group for robotic operations, each robot motion was first simulated in a virtual environment, reconstructed based on the workpiece calibration to ensure precision and feasibility. The vibration monitoring works as feedback for operators for stopping the machining in case of anomalous tool chattering. With the aim of minimizing those vibrations during the machining and maximizing the material removal rate, a trochoidal milling technique was adopted. By performing helicoidal movements with the tool into the material, cuts with depths up to 15 mm were reached without any vibration issue for the robotic arm.’ Gianluca details.
The shielding is now ready for Long Shutdown 3 and waiting to receive the new sector valves of the VAX.

Figure 4. Engineers from BE-CEM group (in charge of the robotic intervention) and from BE-EA group (HL-LHC - WP8). Florence Thompson / CERN